Le gyroscope principal, appelé aussi gyropilote, occupait la partie avant du bâti du pilote automatique.
Il était chargé de maintenir le V1 dans la direction de l’objectif et de corriger les éventuelles déviations de cap pour éviter que le V1 ne se déporte de la trajectoire prédéfinie, par exemple sous l’effet d’un fort vent latéral.
Dans le cas de l’utilisation de la technique du tir angulaire (voir sous « Winkelschuss »), c’est également lui qui faisait virer le V1 pour l’amener sur sa trajectoire de croisière, à l’issue de la grimpée en altitude.
Ce gyroscope, lancé à 20 000 tours/minute, était maintenu en rotation par une turbine pneumatique alimentée en air comprimé à 1,2 kg/cm2. Contrairement aux 2 gyroscopes auxiliaires qui ne pouvaient se mouvoir que dans une dimension, il pouvait bouger dans tous les sens et était incliné à 21° de façon à détecter avec la même sensibilité les mouvements de lacet (horizontal) et de roulis (vertical).
Les mouvements relatifs du gyroscope agissaient sur des cames provoquant un déplacement correspondant d’un injecteur qui obturait ou démasquait l’un ou l’autre des orifices du circuit pneumatique, laissant ainsi passer plus ou moins d’air comprimé vers les servocommandes de direction. Cet air agissait sur celles-ci qui relayaient l’ordre aux gouvernes de direction ou de profondeur.
Le gyropilote corrigeait ainsi constamment le cap et l’altitude, de façon à maintenir le missile sur la trajectoire de vol, en fonction des paramètres introduits avant le départ.
-

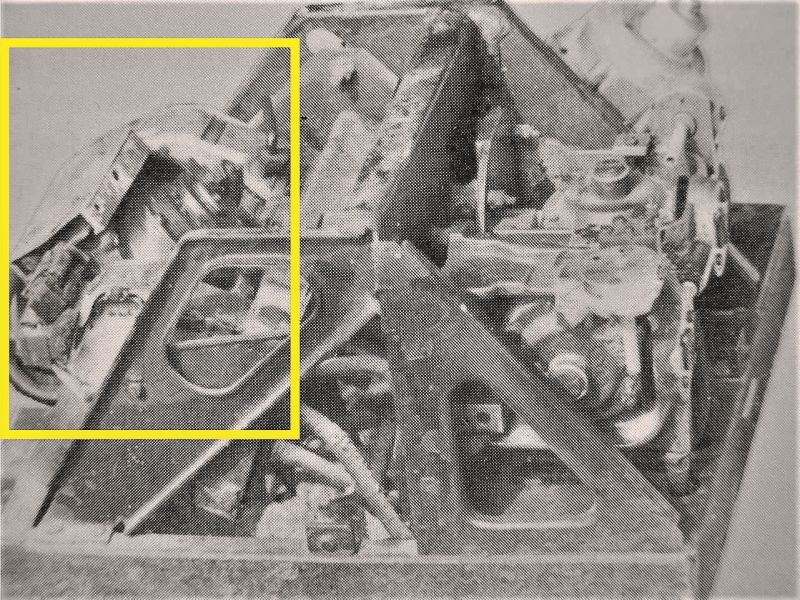
- Le gyropilote en place

-

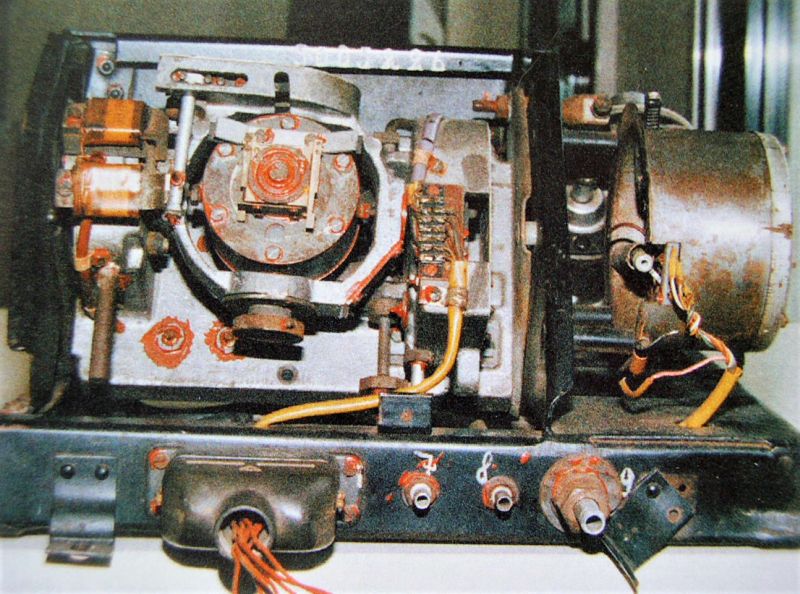
- Vue frontale du gyropilote
-
- Le gyropilote